フライトコントローラーに受信機をつなぐ実験 [ドローン]
F4 Flight ControllerのS.BUS設定も終わり、プロポ側の準備もすんだ。
次は、F4 Flight Controller にプロポの信号が届くかの実験。
まっ、これまでの組み合わせでできるはず。
F4 Flight Controller は、PCとUSBでつなぎ、3本線のケーブルで受信機COOLTECのRSFSBとつなぐ。
受信機の電源は、F4 Flight Controller からもらうことになる。
4.6V出てたから、規格の範囲内。
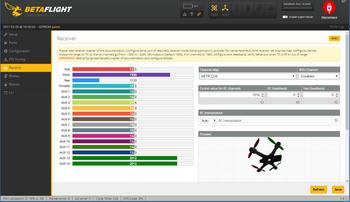
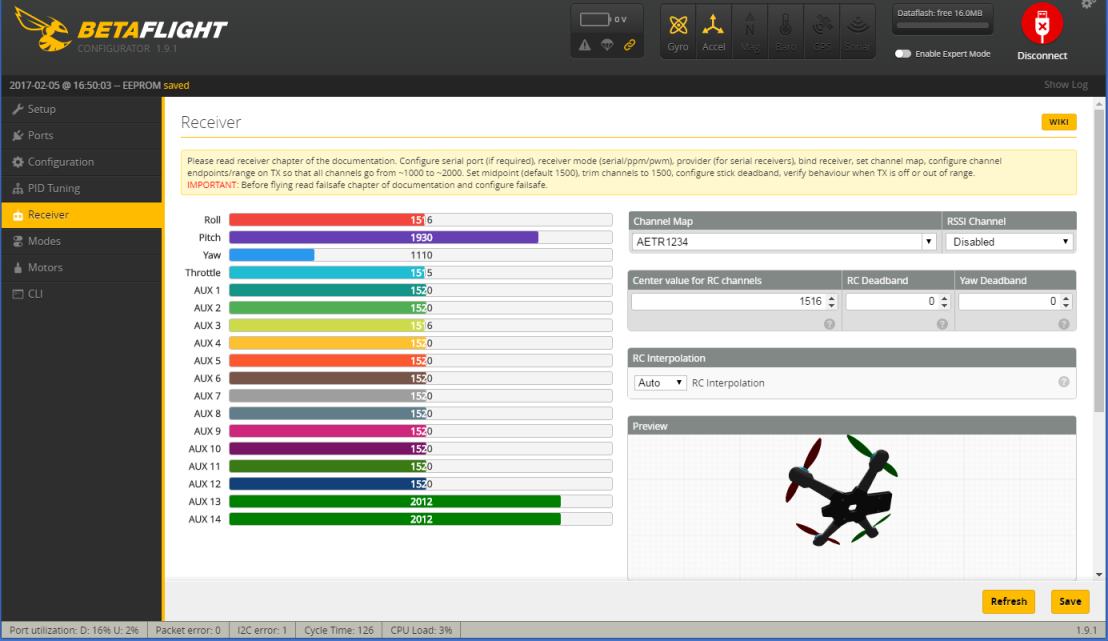
10Jのスロットルで変化します。でも、最大で、1930ns、最小で1110ns。
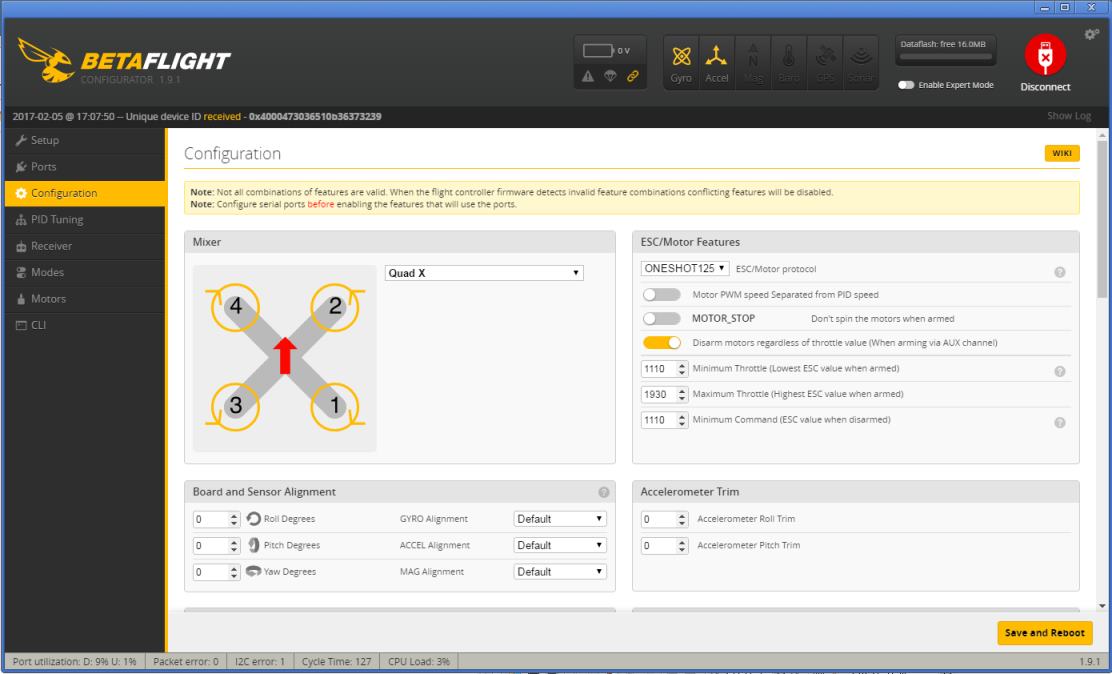
この範囲でしか動かないと言うことだから、ESCのコンフィグレーションは、最大と最小はこの値で行うと言うことになるはず。
それと、センターが1516ns程度なので、画面右側で変更しておきます。

最大値と最小値の変更はこれで良いのかわかりませんが、これで、Motors 画面が最大1930ns、最小1110nsに変わりました。
次は、F4 Flight Controller にプロポの信号が届くかの実験。
まっ、これまでの組み合わせでできるはず。
F4 Flight Controller は、PCとUSBでつなぎ、3本線のケーブルで受信機COOLTECのRSFSBとつなぐ。
受信機の電源は、F4 Flight Controller からもらうことになる。
4.6V出てたから、規格の範囲内。
10Jのスロットルで変化します。でも、最大で、1930ns、最小で1110ns。
この範囲でしか動かないと言うことだから、ESCのコンフィグレーションは、最大と最小はこの値で行うと言うことになるはず。
それと、センターが1516ns程度なので、画面右側で変更しておきます。
最大値と最小値の変更はこれで良いのかわかりませんが、これで、Motors 画面が最大1930ns、最小1110nsに変わりました。
プロポのレシーバー [ドローン]
次は、レシーバー、受信機についてです。
用意したプロポは、FUTABAの10J、ん? T10Jとボディに書いてある。

用意した受信機は、3種類。
買ったらついてきた、FUTABAの純正 R3008SB、
標準の無線通信の手順は、T-FHSS AIR、切替で、S-FHSSになる。
T-FHSS AIR は、送信機側で機体電池の電圧等のテレメトリーを受け取ることができるそうだ。
双方向通信ですね。
S-FHSSにはそれがない。
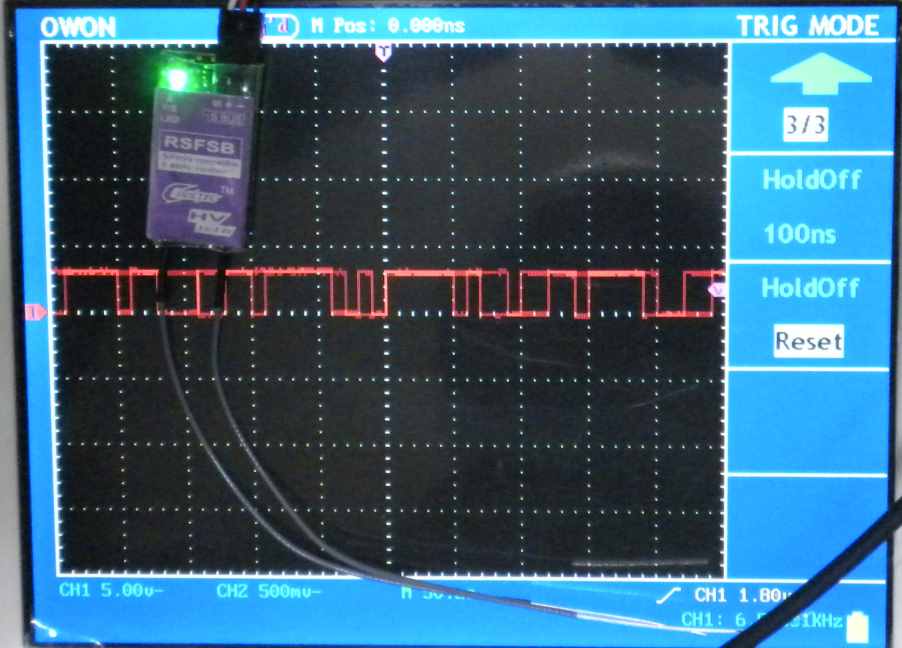
続いて、COOLTECのRSFSB。
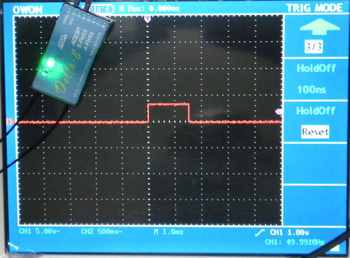
通信は、S-FHSS。出力は、S.SUBのみ。
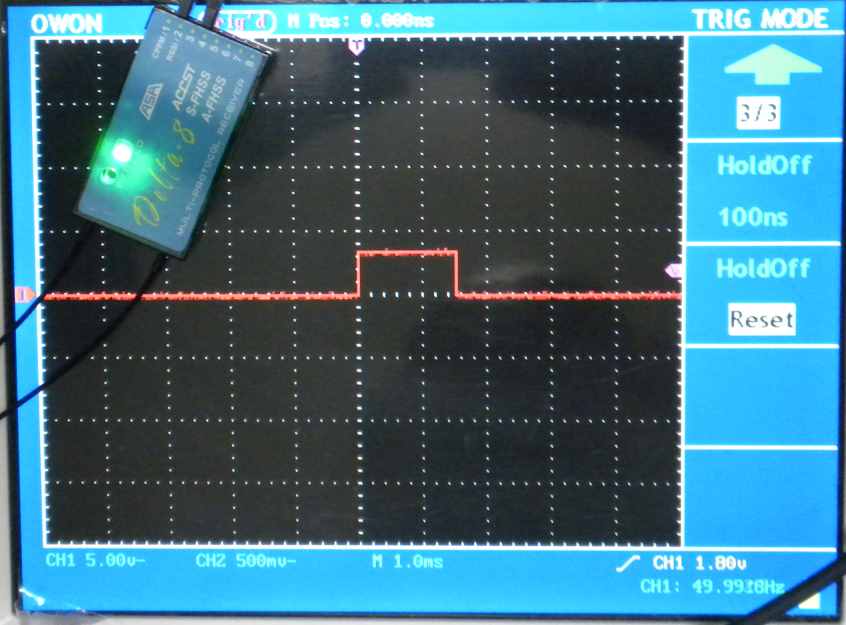
最後は、FrSkyのDelta8。
通信は、S-FHSS。出力は、CPPMかRSSI。
使うには、送信機と受信機をリンクさせる必要がある。
この10Jは30個の受信機をリンクさせ、登録ができるようだ。
買ったらついてきた受信機、R3008SBは即使えるようにリンク済でした。
では、COOLTECのRSFSBのリンク方法。
まず、送信機、10Jで接続するモデル番号を1以外に決めてセットしておきます。
送信機と受信機を10cm以内に近づけます。
電源はどちらも切っておきます。
受信機の電源を入れると、赤LEDが点灯します。

送信機の電源を入れると、受信機の緑LEDが点滅します。
電波は受信していますが、リンクは成立していません。
受信機のスイッチを3秒程度押し続けます。
すると、受信機の緑LEDが点滅から常時点灯(以下「常灯」とします。)に変わります。
これでリンク成立です。

送信機の電源を切ると、受信機は赤LEDの常灯になります。
もう一度送信機の電源を入れると緑LEDの常灯になるはずです。
FrSkyのDelta8のリンク方法。
送信機のモデル番号を別の番号にしておきます。
何センチかは書いてないですが、送信機受信機は近づけておきます。
送信機の電源を先に入れます。
受信機のスイッチを押した状態で電源を入れます。
電源が入れば、スイッチは離して良いです。
LEDがパラパラと点滅しますが、
しばらくすると、赤と緑のLEDが同時に点滅を始めます。
これでリンクできました。

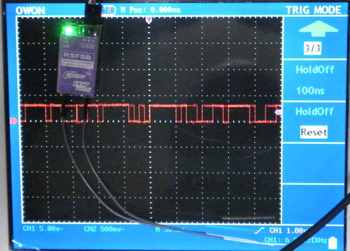
ぼけぼけの写真ですみません。やり直しができないので。
送信機の電源を切ると、緑LEDが点滅します。
電源を入れると、緑LEDが常灯します。
フライトコントローラーと上手く繋がるかはまたいずれ。
とりあえず、こんな信号が出ています。
用意したプロポは、FUTABAの10J、ん? T10Jとボディに書いてある。

用意した受信機は、3種類。
買ったらついてきた、FUTABAの純正 R3008SB、
標準の無線通信の手順は、T-FHSS AIR、切替で、S-FHSSになる。
T-FHSS AIR は、送信機側で機体電池の電圧等のテレメトリーを受け取ることができるそうだ。
双方向通信ですね。
S-FHSSにはそれがない。
続いて、COOLTECのRSFSB。
通信は、S-FHSS。出力は、S.SUBのみ。
最後は、FrSkyのDelta8。
通信は、S-FHSS。出力は、CPPMかRSSI。
使うには、送信機と受信機をリンクさせる必要がある。
この10Jは30個の受信機をリンクさせ、登録ができるようだ。
買ったらついてきた受信機、R3008SBは即使えるようにリンク済でした。
では、COOLTECのRSFSBのリンク方法。
まず、送信機、10Jで接続するモデル番号を1以外に決めてセットしておきます。
送信機と受信機を10cm以内に近づけます。
電源はどちらも切っておきます。
受信機の電源を入れると、赤LEDが点灯します。

送信機の電源を入れると、受信機の緑LEDが点滅します。
電波は受信していますが、リンクは成立していません。
受信機のスイッチを3秒程度押し続けます。
すると、受信機の緑LEDが点滅から常時点灯(以下「常灯」とします。)に変わります。
これでリンク成立です。

送信機の電源を切ると、受信機は赤LEDの常灯になります。
もう一度送信機の電源を入れると緑LEDの常灯になるはずです。
FrSkyのDelta8のリンク方法。
送信機のモデル番号を別の番号にしておきます。
何センチかは書いてないですが、送信機受信機は近づけておきます。
送信機の電源を先に入れます。
受信機のスイッチを押した状態で電源を入れます。
電源が入れば、スイッチは離して良いです。
LEDがパラパラと点滅しますが、
しばらくすると、赤と緑のLEDが同時に点滅を始めます。
これでリンクできました。

ぼけぼけの写真ですみません。やり直しができないので。
送信機の電源を切ると、緑LEDが点滅します。
電源を入れると、緑LEDが常灯します。
フライトコントローラーと上手く繋がるかはまたいずれ。
とりあえず、こんな信号が出ています。
F4 Flight Controller その6 [ドローン]
どうも、ファームウエアがバージョンアップしたみたいです。
3.1.0
になっています。今日の日付ですね。
とりあえず、書き換えておきました。
何が違うのか理解していませんが。
3.1.0
になっています。今日の日付ですね。
とりあえず、書き換えておきました。
何が違うのか理解していませんが。
F4 Flight Controller その5 [ドローン]
今回は、コントローラーとレシーバーとの通信確立のための準備です。
F4 Flight Controller は、基本的に、レシーバーと、S.BUSでつながるようだ。
そこで、コントローラーに、入力される信号は、S.BUSだよと教えてやる必要がある。
ま、いろいろハードが存在しているのだろう。その差違をソフトが吸収していると言うことか。
まず、Portの設定です。コネクトしてから、Ports をクリックします。

このように変更して、右下の Save and Reboot ボタンを押します。
もう一度、コネクトして。今度は、Cofiguration です。
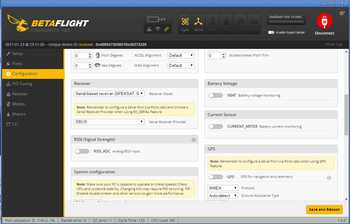
Receiver を SBUS にしておきます。なお、ファームが古いと、SBUSは出てこないように感じました。

同じ画面の下の方、 Other Features の BLACKBOXをOFFにしておきます。
右下の Save and Reboot ボタンを押します。
設定の第一段階は終わりです。これでレシーバーと通信が可能(となるばす)です。
ただ、不思議なのは、BetaFright の画面の各項目の位置が昨夜と違うように思うのです。
なぜなのだろう。
F4 Flight Controller は、基本的に、レシーバーと、S.BUSでつながるようだ。
そこで、コントローラーに、入力される信号は、S.BUSだよと教えてやる必要がある。
ま、いろいろハードが存在しているのだろう。その差違をソフトが吸収していると言うことか。
まず、Portの設定です。コネクトしてから、Ports をクリックします。
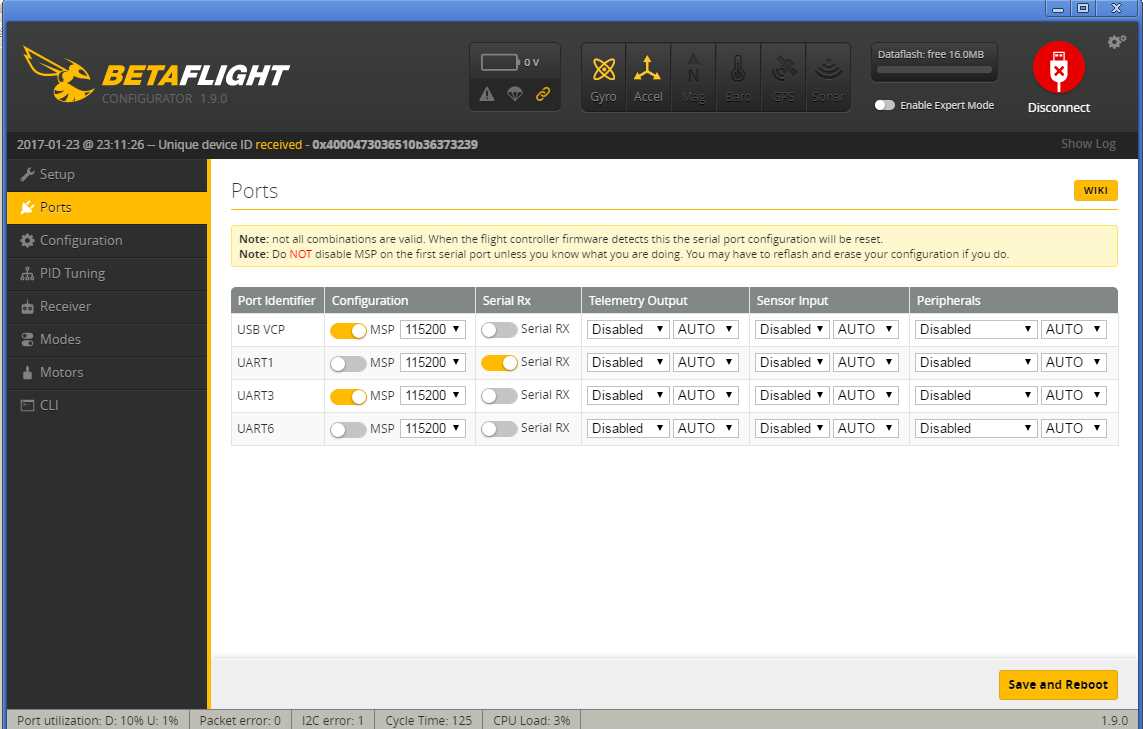
このように変更して、右下の Save and Reboot ボタンを押します。
もう一度、コネクトして。今度は、Cofiguration です。
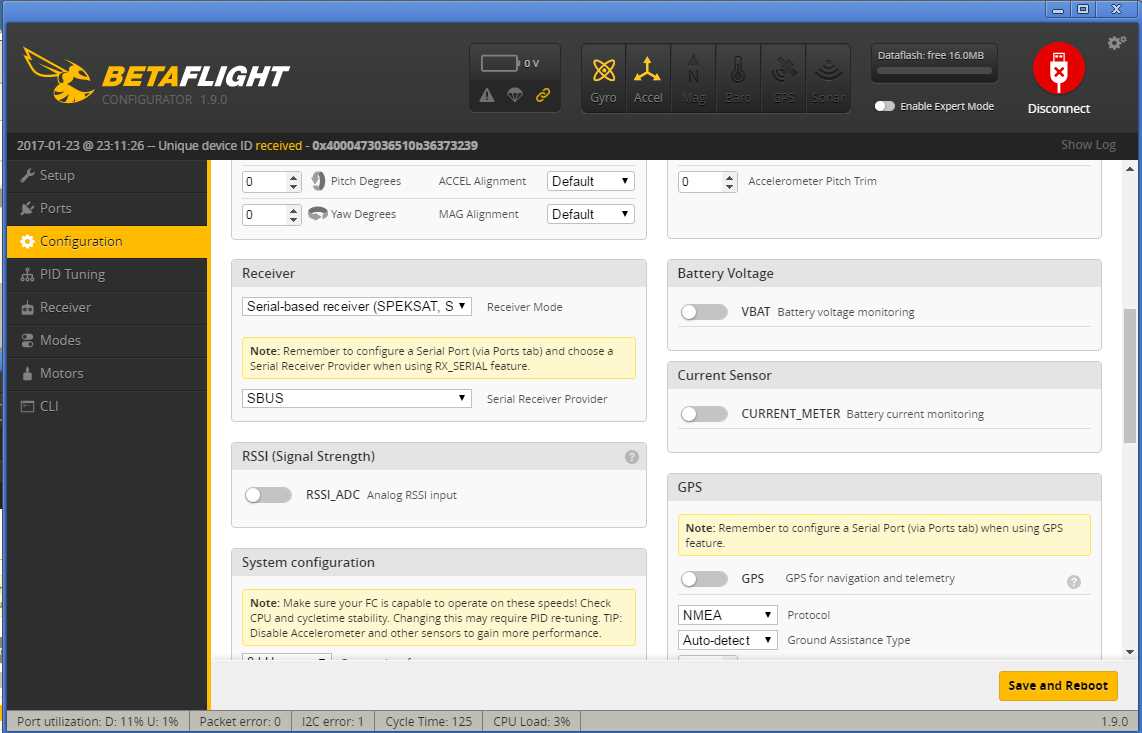
Receiver を SBUS にしておきます。なお、ファームが古いと、SBUSは出てこないように感じました。
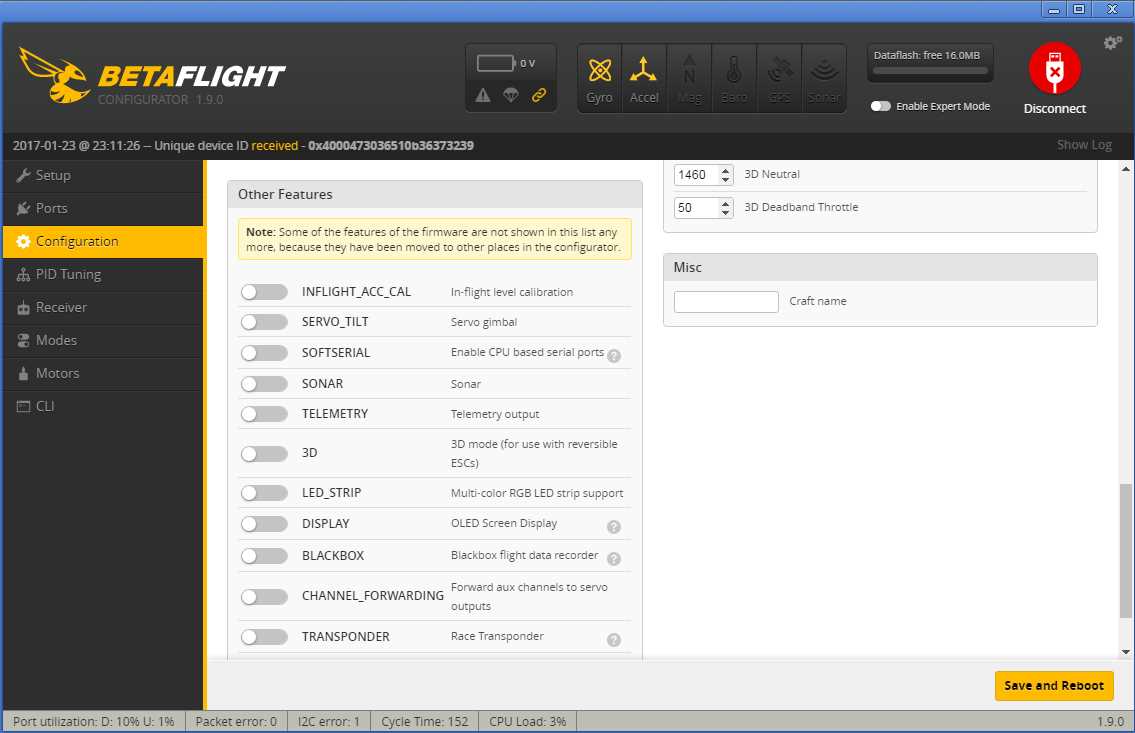
同じ画面の下の方、 Other Features の BLACKBOXをOFFにしておきます。
右下の Save and Reboot ボタンを押します。
設定の第一段階は終わりです。これでレシーバーと通信が可能(となるばす)です。
ただ、不思議なのは、BetaFright の画面の各項目の位置が昨夜と違うように思うのです。
なぜなのだろう。
ブラシレスモーターとプロペラ [ドローン]
AliExpressからの購入は、結構安いので、ついつい余分に買ってしまう。
で、最初にモーターは、AKASO 2204 2300KV と2枚羽根のプロペラを同じ店舗で買って回していた。
その後、Emax RS2205-2300KV のモーターと3枚羽根のプロペラを別々に買った。
で、AKASOのモーターに3枚羽根をつけようとすると、、、、、はいらない!
で、Emax につけてみると、ぴったり。
どれも同じと思っていたのですが、違うようです。
モーターの軸をノギスで計ってみると、
AKASO 5.1mm
Emax 5.0mm
AKASOは結構安いので、精度もそれなりなのか、プロペラがAKASO専用だったのかは不明。
まあ、それぞれで使えば良いわけです。機体が2台になる訳か。
いずれにせよ、AKASOのモーターを買ったときは、同時に同じ店舗でプロペラも買うようにした方が良いのでしょう。
・・・・買うことあるかな。信頼性次第かな。
で、AKASOって、メーカー名? 店舗名?
で、最初にモーターは、AKASO 2204 2300KV と2枚羽根のプロペラを同じ店舗で買って回していた。
その後、Emax RS2205-2300KV のモーターと3枚羽根のプロペラを別々に買った。
で、AKASOのモーターに3枚羽根をつけようとすると、、、、、はいらない!
で、Emax につけてみると、ぴったり。
どれも同じと思っていたのですが、違うようです。
モーターの軸をノギスで計ってみると、
AKASO 5.1mm
Emax 5.0mm
AKASOは結構安いので、精度もそれなりなのか、プロペラがAKASO専用だったのかは不明。
まあ、それぞれで使えば良いわけです。機体が2台になる訳か。
いずれにせよ、AKASOのモーターを買ったときは、同時に同じ店舗でプロペラも買うようにした方が良いのでしょう。
・・・・買うことあるかな。信頼性次第かな。
で、AKASOって、メーカー名? 店舗名?
F4 Flight Controller その4 失敗編 [ドローン]
さて、前回はDFUとして認識できた訳だが、この続きで失敗したので、その報告です。
このDFUの状態で、CPUのFirmwareの書き換えができるわけだが、
結論から言うと、このF4 Flight ControllerのボードはFirmwareが書き込まれています。
なので、最新版に書き換えるときの参考としてください。
今回、私は、RaceFlightの画面からFirmwareを書き換えようとしました。
まず、Firmwareとして、REVOLT_BB413_STD.binをPCにダウンロードしておき、
RaceFligh画面の左にあるメニューから、Firmware Flasher を選択し、
右下のLoad Firmware{local}のボタンをクリックし、先にダウンロードしておいたFirmwareを選択しました。
次に、Flashe Firmware のボタンが有効になるので、これをクリックすると、
CPU内のFirmwareが消去され、続いて選択したFirmwareが書き込まれます。
終了すると、、、、、あれ?DFUとしてしか接続できない。
最初に出ていたバーチャルドローンが出てこない。
RaceFlightを使ったこと自体が間違いだったらしい。
(正しいFirmwareが選択できない。)
それではと、Google ChromeでBetaflightを検索し、これでやってみることにした。
まず、BetaflightをGoogle Chromeに追加します。
Betaflightの画面の時、基板を、ボタンを押しながら接続します。DFUとして接続しました。
左のメニュー Firmware Flasherを選択。
プルダウンメニューからLEVOを選択。
その下のプルダウンメニューから最新版のFirmware選択。
右下のボタンの真ん中、Load Firmwareをクリック。
次に、Flashe Firmware のボタンが有効になるので、これをクリック。
CPU内のFirmwareが消去され、続いてFirmwareが書き込まれます。
終了すると、DFU接続が解除され、画面が変わります。
青色LEDが点滅し、バーチャルドローンが動き出しました。
この画面でConfigurationするようですが、どこをいじればよいのか、、、、次の課題です。
このDFUの状態で、CPUのFirmwareの書き換えができるわけだが、
結論から言うと、このF4 Flight ControllerのボードはFirmwareが書き込まれています。
なので、最新版に書き換えるときの参考としてください。
今回、私は、RaceFlightの画面からFirmwareを書き換えようとしました。
まず、Firmwareとして、REVOLT_BB413_STD.binをPCにダウンロードしておき、
RaceFligh画面の左にあるメニューから、Firmware Flasher を選択し、
右下のLoad Firmware{local}のボタンをクリックし、先にダウンロードしておいたFirmwareを選択しました。
次に、Flashe Firmware のボタンが有効になるので、これをクリックすると、
CPU内のFirmwareが消去され、続いて選択したFirmwareが書き込まれます。
終了すると、、、、、あれ?DFUとしてしか接続できない。
最初に出ていたバーチャルドローンが出てこない。
RaceFlightを使ったこと自体が間違いだったらしい。
(正しいFirmwareが選択できない。)
それではと、Google ChromeでBetaflightを検索し、これでやってみることにした。
まず、BetaflightをGoogle Chromeに追加します。
Betaflightの画面の時、基板を、ボタンを押しながら接続します。DFUとして接続しました。
左のメニュー Firmware Flasherを選択。
プルダウンメニューからLEVOを選択。
その下のプルダウンメニューから最新版のFirmware選択。
右下のボタンの真ん中、Load Firmwareをクリック。
次に、Flashe Firmware のボタンが有効になるので、これをクリック。
CPU内のFirmwareが消去され、続いてFirmwareが書き込まれます。
終了すると、DFU接続が解除され、画面が変わります。
青色LEDが点滅し、バーチャルドローンが動き出しました。
この画面でConfigurationするようですが、どこをいじればよいのか、、、、次の課題です。
F4 Flight Controller その3 [ドローン]
zadigドライバーについて
zadig_2.2.exeを起動。
option から List All Devices を選択。
基板上のボタンを押しながら、USBケーブルをつなぐ。
緑のLEDが点灯。
zadig が STM32 BOOTLOADER を認識。
Install Driver ボタンをクリック。
インストールが始まる。
終了すると、
デバイスマネージャーが STM32 BOOTLOADER を認識。
場所は、Universal Serial Bus devices
RACEFLIGHT を起動すると、基板は、DFUと認識した。
今日はここまで。
zadig_2.2.exeを起動。
option から List All Devices を選択。
基板上のボタンを押しながら、USBケーブルをつなぐ。
緑のLEDが点灯。
zadig が STM32 BOOTLOADER を認識。
Install Driver ボタンをクリック。
インストールが始まる。
終了すると、
デバイスマネージャーが STM32 BOOTLOADER を認識。
場所は、Universal Serial Bus devices
RACEFLIGHT を起動すると、基板は、DFUと認識した。
今日はここまで。
F4 Flight Controller その2 [ドローン]
本日は、F4 Flight ControllerがPCとつながるか、やってみた。
以前、mbedでSTM32Fはつないだことがあるので、もしやと思い、そのままUSBケーブルでつないでみたが、ドライバはインストールされなかった。
次に、Zadig:のドライバを入れ見たが、やり方が悪いのか、だめだった。
最後に、RaceFlight Firmware にある STM32 Driver Downloads から、Win 7 x64 F4 Driver をクリックして、vcpDriver.zip をためしてみることにした。
これを解凍すると、Win8用とWin7用のそれぞれに、amd64用と、x86用のドライバがあった。
この中から、使用しているPC似合わせて、WIn7 amd64用のドライバーをインストールしてみたところ、
F4 Flight Controller のボードがCOM7として認識された。
RACEFLIGHT の画面で、COM7を選択肢、conectボタンをクリックすると、画面上のバーチャルドローンが反応した。
基板上のジャイロを読み取っているようだ。
と言うことは、ファームウエアは書き込んであるのかな。
あっ、忘れていましたが、基板をPCとケーブルでつなぐと、ドライバーに関係なく、基板上のLEDが光ります。
緑が点灯、青が点滅です。
とりあえず、今日はここまで。
追記
しかし、もっと調べようと、検索すると、ここが上の方に出てくるのは、ちとがっかりです。だって、情報が少ないと言うことだから。
以前、mbedでSTM32Fはつないだことがあるので、もしやと思い、そのままUSBケーブルでつないでみたが、ドライバはインストールされなかった。
次に、Zadig:のドライバを入れ見たが、やり方が悪いのか、だめだった。
最後に、RaceFlight Firmware にある STM32 Driver Downloads から、Win 7 x64 F4 Driver をクリックして、vcpDriver.zip をためしてみることにした。
これを解凍すると、Win8用とWin7用のそれぞれに、amd64用と、x86用のドライバがあった。
この中から、使用しているPC似合わせて、WIn7 amd64用のドライバーをインストールしてみたところ、
F4 Flight Controller のボードがCOM7として認識された。
RACEFLIGHT の画面で、COM7を選択肢、conectボタンをクリックすると、画面上のバーチャルドローンが反応した。
基板上のジャイロを読み取っているようだ。
と言うことは、ファームウエアは書き込んであるのかな。
あっ、忘れていましたが、基板をPCとケーブルでつなぐと、ドライバーに関係なく、基板上のLEDが光ります。
緑が点灯、青が点滅です。
とりあえず、今日はここまで。
追記
しかし、もっと調べようと、検索すると、ここが上の方に出てくるのは、ちとがっかりです。だって、情報が少ないと言うことだから。
F4 Flight Controller [ドローン]

たいした考えもなく、このフライトコントローラーを買ってしまった。
で、これ、CPUは、STM32 F405を使っており、そこから、F4が来ていることもわかった。
Raceflight CC3D REVOというファームウエアが必要で、基板上にはMPU6000というジャイロが乗っていることもわかった。
そのファームウエアであるが、どうもここ
http://revoltfc.com/download.html
のRaceFlight Configuratorが書込と初期設定用のソフトで、肝心のファームウエアは、RaceFlight Firmwareから入手するらしい。
実際、いくつもあって、どれかわからない。たぶん、REVOと書いてある物では無かろうか。
さて、RaceFlight Configuratorであるが、これは、どうやら、Google Chromeをベースにしているようだ。
IEからはダウンロードできない。
なので、Google Chromeをインストールし、Google Chromeから上記URLにアクセスし、ようやくダウンロードできた。
とりあえず、今日はここまで。あとは、youtubeを参考にするしかないのかな。
https://www.youtube.com/watch?v=nR1hgBjOjtQ
表示がうまくいかないので、ダミー代わりです
https://www.youtube.com/watch?v=nR1hgBjOjtQ
https://www.youtube.com/watch?v=y8IX-qf86VQ
https://www.youtube.com/watch?v=n4Lr8bterEQ
https://www.youtube.com/watch?v=slTnQh4L8tQ
https://www.youtube.com/watch?v=9R02D27L9nI
https://www.youtube.com/watch?v=U8ZUcWtc5Ag
https://www.youtube.com/watch?v=xDM6TzdEjqg
これも参考になるな。
https://flexrc.com/2016/10/18/f4-flight-controller-acro-connection-diagram/
追加
https://www.youtube.com/watch?v=nR1hgBjOjtQ
これからどんどん増えていくのかな



