フライトコントローラーに受信機をつなぐ実験 [ドローン]
F4 Flight ControllerのS.BUS設定も終わり、プロポ側の準備もすんだ。
次は、F4 Flight Controller にプロポの信号が届くかの実験。
まっ、これまでの組み合わせでできるはず。
F4 Flight Controller は、PCとUSBでつなぎ、3本線のケーブルで受信機COOLTECのRSFSBとつなぐ。
受信機の電源は、F4 Flight Controller からもらうことになる。
4.6V出てたから、規格の範囲内。
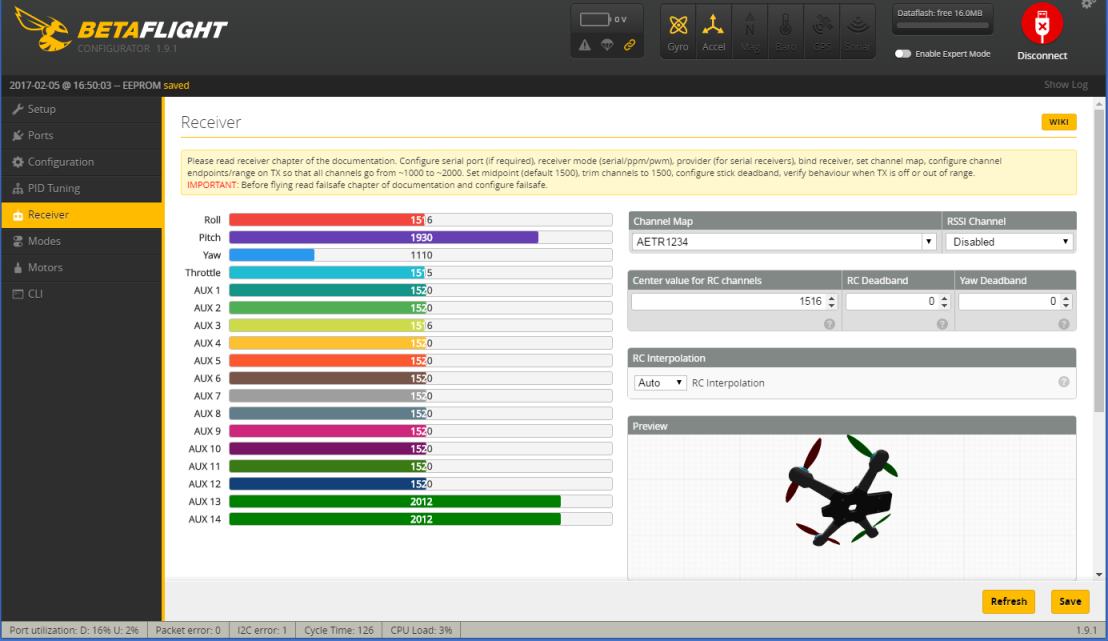
10Jのスロットルで変化します。でも、最大で、1930ns、最小で1110ns。
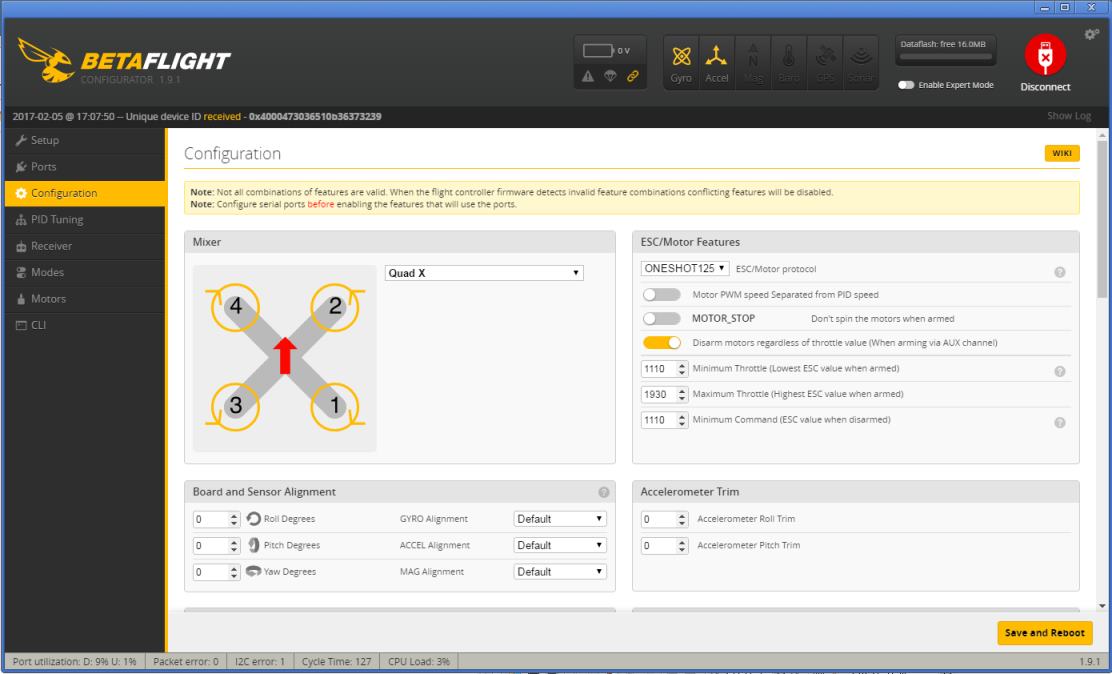
この範囲でしか動かないと言うことだから、ESCのコンフィグレーションは、最大と最小はこの値で行うと言うことになるはず。
それと、センターが1516ns程度なので、画面右側で変更しておきます。

最大値と最小値の変更はこれで良いのかわかりませんが、これで、Motors 画面が最大1930ns、最小1110nsに変わりました。
次は、F4 Flight Controller にプロポの信号が届くかの実験。
まっ、これまでの組み合わせでできるはず。
F4 Flight Controller は、PCとUSBでつなぎ、3本線のケーブルで受信機COOLTECのRSFSBとつなぐ。
受信機の電源は、F4 Flight Controller からもらうことになる。
4.6V出てたから、規格の範囲内。
10Jのスロットルで変化します。でも、最大で、1930ns、最小で1110ns。
この範囲でしか動かないと言うことだから、ESCのコンフィグレーションは、最大と最小はこの値で行うと言うことになるはず。
それと、センターが1516ns程度なので、画面右側で変更しておきます。
最大値と最小値の変更はこれで良いのかわかりませんが、これで、Motors 画面が最大1930ns、最小1110nsに変わりました。
2017-02-05 19:32
nice!(0)
コメント(0)
トラックバック(0)




コメント 0